|
Electricity - Basic Navy Training Courses NAVPERS 10622 |
|
Here is the "Electricity - Basic Navy Training Courses" (NAVPERS 10622) in its entirety. It should provide one of the Internet's best resources for people seeking a basic electricity course - complete with examples worked out. See copyright. See Table of Contents. • U.S. Government Printing Office; 1945 - 618779
Chapter 16 Although there are a number of types of d-c motors, ONE, and only one, will
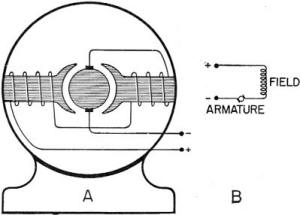
work on a.c. It's the so-called SERIES or UNIVERSAL motor. The term "series,"
applied to a motor means that the field and armature are connected IN SERIES with
each other. This connection is shown in figure 155. A is the wiring diagram and
B is the schematic. Since the field and armature are in series they must carry exactly
the same current. And this is the key to "why" a series-universal motor
works in a.c.
Figure 155. - Series-universal motor. You prove that the motor has torque in the SAME DIRECTION for both directions
of current. Use the motor hand rule.
ALTERNATING current Alternating current does certain things that direct current does not do. And
for this reason, most a-c motors are altogether different than d-c motors. Before
you begin the study of a-c motors, it would be a good idea to review the main points
on alternating current - the table at the end of Chapter 13 gives you a good outline
of a.c., its fields, and inductive action.
Figure 156. - Series motor on a.c. Don't get the idea that the negative current is any weaker than the positive
current - they're absolutely EQUAL in strength, and regardless of the a.c. reversing
direction, it does just as much work as d.c.
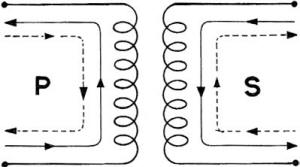
IDEA NO. 1 - MUTUAL INDUCTION IN A.C. The first basic idea - MUTUAL INDUCTION-you are familiar with. (Review Chapter 13 for the introduction of this idea.) The important fact in mutual induction, is that the INDUCED voltage in the secondary is always OPPOSITE to the APPLIED voltage of the primary. Which means that every time the PRIMARY has POSITIVE current, the SECONDARY has NEGATIVE current - and vice versa. This is not so complex - look at figure 157. It shows two ordinary coils; P, the primary and S, the secondary.
Figure 157. - Mutual induction polarities. The solid arrows show current directions when the primary is POSITIVE and the broken arrows . show current directions when the primary is NEGATIVE. With a.c., the primary is positive half of the time and negative the other half of the time. A NORTH pole appears at the top of the primary coil when the current is positive. And when the primary is positive, the secondary is negative, and a SOUTH pole appears at the top of the secondary coil. The other half of the time, the primary coil is negative and has a SOUTH pole at its top. In short, a NORTH INDUCES A SOUTH, AND A SOUTH INDUCES A NORTH. Check these polarities with the hand rule for coils.
Work the problems for yourself - it's the only way you'll become "good" at using the hand rules. The coils of figure 157 make up a simple TRANSFORMER. And the action of ALWAYS INDUCING OPPOSITE POLARITY ON the SECONDARY is called the TRANSFORMER PRINCIPLE or TRANSFORMER ACTION. Transformers are mutual induction devices for the transfer of voltage from a primary circuit to a secondary circuit. IDEA NO. 2 - POLYPHASE A.C. The second basic idea that you must get straight before studying a-c motors is POLYPHASE CIRCUITS. Polyphase means MORE THAN ONE TIME. The term comes from two words - "poly," meaning MORE THAN ONE and "phase," meaning TIME.
Polyphase a.c. is produced by a special kind of alternator. For example, a two-phase
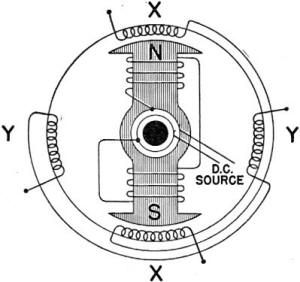
alternator (two "times") has two separate windings in the stator. Figure
158 shows the two windings-they are placed in the stator 90° apart. Now, imagine
that the rotor is turning. notice that the Y windings are cut by the rotor's flux
AFTER the X windings are cut. This causes the induced voltages in the two windings
to have different TIMING. For the Two-phase system, there are TWO sets of TIMING
for the rise and fall and reversing of a.c.
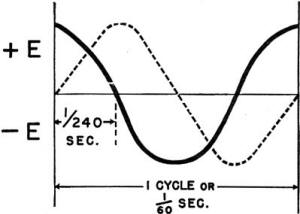
Figure 158. - Two-phase alternator. Like all scientific measurements, there is an accurate method for measuring
the OUT-OF-PHASENESS (out-of-timeness) of these two voltages. It is possible to
use a standard unit of time - the second. If the rotor is revolving at 60 revolutions
per second, each revolution, or cycle, takes 1/60th of a second. And, if you examine
the graphs carefully, you'll find that the Y voltage is exactly one-quarter of a
cycle behind the X voltage. One-quarter of 1/60th is 1/4th x 1/60th second, or 1/240th
second. Which means that the Y voltage is behind the X voltage by 1/240th second.
In other words - the voltages are 1/240th of a second out-of-phase.
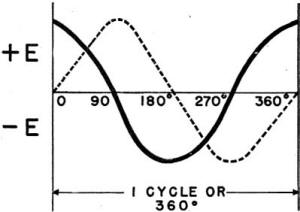
Figure 159. - Two-phase voltages. How many electrical degrees from the north to the south of the rotor in figure
158? 180 ELECTRICAL DEGREES. How many electrical degrees all the way around-from,
north to south and back to north? 360 ELECTRICAL DEGREES. How many, degrees from
the north to half-way to the south? 90 ELECTRICAL DEGREES.
Figure 160. - Two-phase voltages-electrical degrees. Graphs of a-c voltage like this are called SINE WAVES. notice that the sine
waves tell you exactly how much the voltages are out-of-phase (out-of-time), AND,
the exact position of the coils in the alternator. If the sine waves are 90 electrical
degrees apart, then the coils of the alternator, which produced the voltages, are
90 electrical degrees apart.
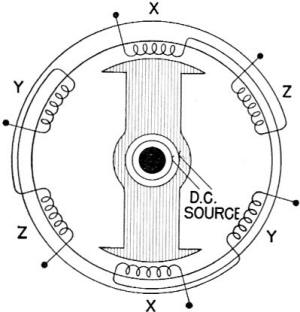
Figure 161. - Three-phase alternator. Using the X voltage as a reference, the Y voltage is 120° behind the X and the Z is 120° behind the Y. do not FORGET THAT 120° MEANS A DEFINITE LENGTH OF TIME - A DEFINITE FRACTION OF A SECOND.
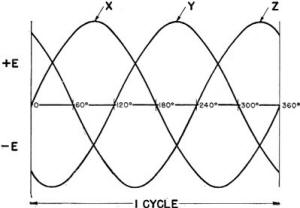
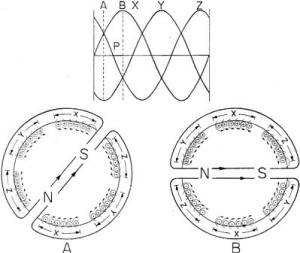
Figure 162. - Three-phase voltages. the ROTATING MAGNETIC FIELD Most of the large a-c motors are three-phase jobs. Their stators are constructed exactly like the stator of a three-phase alternator (figure 161) - three separate windings - each winding displaced 120° from the others. On each winding is impressed one of the phases from a three-phase alternator.
Figure 163. - The rotating magnetic field. Figure 163 shows two cross-sectional views of a part of a three-phase motor
stator. The current directions in A correspond to the instant marked A on the sine
waves. Likewise, the current directions in B correspond to the instant marked B
on the sine waves. notice what happens - in A, the flux is forming a north pole
between the X and Z windings. Use your hand rule for each conductor to prove this.
In B, the current in the Z winding has changed direction and this MOVES the POLE
to between the Z and Y windings. notice that the Z current changed direction at
point, P. In short, the change in direction of current in one phase has caused the
flux field to shift around the surface of the stator. This shifting of flux is true
for all the other parts of the stator and also for all the other poles. It's also
true for cycle after cycle. The total effect is that A MAGNETIC FIELD MOVES AROUND
the SURFACE OF the STATOR. As each phase changes current direction the poles MOVE
the width of THAT PHASE. And this field rotates FAST. The changes within phases
take place every 1/360th of a second. In fact, it only takes 1/60th of a second
for the field to rotate COMPLETELY around this stator.
the A-C INDUCTION MOTOR This type of three-phase motor runs because of MUTUAL INDUCTION and a ROTATING FIELD. The rotor has a short-circuited winding. And as the rotating field of the stator sweeps across the rotor windings, A VOLTAGE IS INDUCED. The poles which are produced in the rotor are from INDUCED current. Therefore, they are always OPPOSITE to the poles on the stator, which induced them. What happens? Attraction occurs between the stator and rotor poles. Since the stator poles are moving (rotating), they tend to drag the rotor poles along. Torque is produced and the rotor rotates.
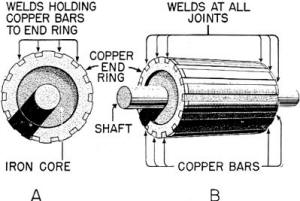
Figure 164. - The squirrel cage rotor. This motor is called the SQUIRREL CAGE motor because of the construction of
its rotor. Figure 164 shows two views of the squirrel cage rotor. It consists of
an iron core mounted on a shaft. And there are copper bars running in slots the
length of this core. At each end, a copper END RING is welded to each and every
copper bar. This makes the rotor a certain SHORT CIRCUIT.
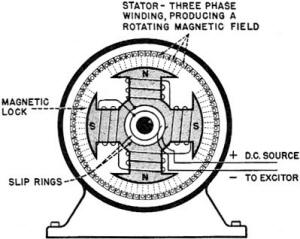
the SYNCHRONOUS MOTOR Another three-phase motor is the SYNCHRONOUS type. This motor is not an induction
motor. The stator is the regular three-phase rotating field job -but the rotor has
field poles ENERGIZED BY D.C. The d.c. is generated by a small generator called
an EXCITOR mounted on the end of the rotor shaft. This d.c. is fed into the rotor
by means of slip rings.
Figure 165. - Synchronous motor. The synchronous motor is not a self-starting motor. Its rotor is heavy and, from a dead stop, it is impossible to bring the rotor into magnetic lock with the rotating field. For this reason, all synchronous motors have some kind of starting device. A simple starter is another motor - either d.c. or of the induction type - which starts the unloaded synchronous job and carries it up to about 90 percent or 95 percent of speed. Then the starting motor is disconnected and the synchronous motor PULLS INTO STEP with its magnetic lock. Another starting method is a second winding of the squirrel cage type added to the rotor d-c windings. This induction winding brings the motor almost up to speed by following the rotating field. Then the d.c. is cut into the synchronous rotor and the rotor pulls into step. The latter method is the most commonly used for starting synchronous motors. A SNAP Reversing any three-phase motor is a snap. Just interchange ANY TWO STATOR LEADS.
By doing so, the phases are interchanged. Z follows Y instead of following X in
the process of reversing polarity. The rotating magnetic field goes around the other
way. And the rotor follows it-the motor has reversed rotation.
TWO-PHASE MOTORS Many years ago, two-phase motors were built - but today, it's not likely that you'll ever see one. If you should happen to run across a two-phase job - outside of F. C. equipment or an old ship - just remember that the types and principles of operation are exactly like the three-phase motors. SINGLE-PHASE MOTORS Three-phase motors are the most efficient and all-around best motors built.
And if three-phase current were always available, you'd never see a single-phase
motor. But it takes a special kind of alternator to produce three-phase voltage.
And, when you can't get three-phase - single-phase must be used.
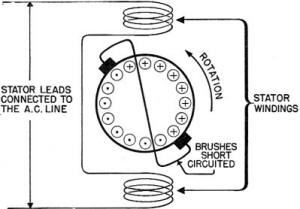
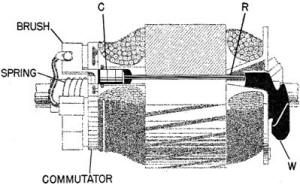
Figure 166. - Repulsion motor. STATOR WINDINGS Many of these repulsion motors have a short circuiting device connected with a CENTRIFUGAL SWITCH. When the motor reaches about 75 percent of full speed, the centrifugal switch lifts the brushes off the commutator AND short circuits all the segments. The rotor is just like a squirrel cage job - short circuited. It continues to run - but as an INDUCTION motor. The advantage of this short circuiting is a saving in wear and tear on the commutator and brush system. After all, the brushes and commutator were only put on the motor to start it - and once it gets going, it will continue to run. And what is a CENTRIFUGAL SWITCH? It's a movable device with a weight which whirls with the motor. When the force on this weight gets strong enough, it flys out and throws the switch. Figure 167 shows a repulsion motor rotor with a centrifugal switch. W is the weight and R is a rod attached to the weight. C is a copper ring for short circuiting the commutator segments. When the weight flys outward because of the increased speed, it pushes the rod forward. The rod LIFTS the BRUSHES and the RING SHORTS the SEGMENTS all in one operation.
Figure 167. - Repulsion rotor with centrifugal switch. When a repulsion motor is equipped for short circuiting the rotor, it is called
a REPULSION-INDUCTION motor. The name comes from the fact that it starts on repulsion
and funs on induction. This is a fairly rugged motor - it's one of the best single-phase
a-c jobs. The only disadvantage is in the brush and commutator rig. It gets dirty
and is subject to wear and arcing. It's always best to use a motor WITHOUT slipping
contacts, if possible.
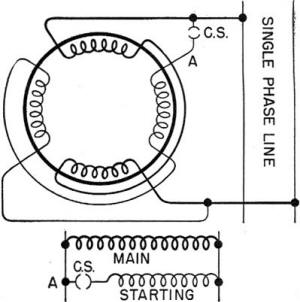
Figure 168. - Split phase motor. CENTRIFUGAL SWITCH notice the centrifugal switch in figure 168. It disconnects the starting winding
after the motor has picked up speed. This is always necessary in resistance type
starting. The winding would burn out, because of its high resistance, if it weren't
dis-connected as quickly as possible.
STARTERS FOR A-C MOTORS D-c motors required starter rheostats for motors over 5 hp. A-c motors likewise require some means of limiting current at start. But a-c motors can stand more current without burning - usually only motors of 25 hp or more have starters. That's a good thing because almost all single-phase motors are less than 25 hp. This eliminates the necessity of starters on just about everything except three-phase jobs.
All starters have just one main job to do - cut down the current at the start. This job can be done in three different ways. First, by a resistance. Second, by a TRANSFORMER which reduces voltage across the stator and thereby reduces current (I = E/R). Third, by a STAR-DELTA switch which changes the windings of the stator from a parallel to a series connection (there is more resistance in a series connection).
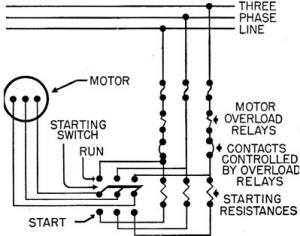
Figure 169 is a schematic of a resistance STARTER. You can apply this schematic to ANY starter. Just substitute transformers or a star-delta switch for the resistors. notice that three resistors are necessary - one for each phase. The switch is first thrown DoWN. This puts the resistors in the lines. After the motor has built up speed and it can stand more current, the switch is thrown UP, thereby cutting out the resistance and putting the motor directly on the full line voltage.
Figure 169. - resistance starter. The MOTOR OVERLOAD RELAYS are interesting devices. They're simply solenoid coils
carrying the motor's current. The cores of the coils are attached to the overload
contacts. Suppose the motor is over-loaded - drawing too much current. It would
soon overheat and burn out if it were not for the relays. The excessive current
going through the overload relays sets up a field which pulls the cores up into
the coils. The contacts pop open and stop the motor. All of these relays have reset
buttons. When the reset buttons are pushed, the core returns to the normal position
and the contacts are reclosed.
REMOTE CONTROL starters have the starting switch at some handy place. Lines then run to the motor. For example, it's a lot easier to control a bilge pump from the dynamo room, than to have to go down to the double bottoms to turn it on and off. A remote control system simply lengthens the lines from starter switch to motor.
Chapter 16 Quiz
|