|
December 1958 Radio-Electronics
 [Table of Contents] [Table of Contents]
Wax nostalgic about and learn from the history of early electronics.
See articles from Radio-Electronics,
published 1930-1988. All copyrights hereby acknowledged.
|
 Werner von Braun and his team of rocket scientists
are credited with developing the first useful inertial stabilization platforms for
ballistic missiles. The infamous and formidable
V2 rocket wreaked terror upon
the heads of Londoners during the latter days of World War II. It served to
keep the rocket in a fixed orientation during the boost phase of the flight, but
did not serve any active targeting function. Inertial navigation systems, on the
other hand, are used to provide both accurate positional and attitude information
for the pilot (if the platform has one) and to steer the platform (vehicle) to a
predetermined destination. Inertial navigation systems are therefore much more complex.
Early inertial navigation systems relied on physical spinning gyroscopes mounted
within a series of nearly frictionless gimbals to maintain a fixed reference position
in space. Contactless encoders about the rotation axes of the gimbals sent positional
information to a computer, which then performed necessary calculations and sent
formatted data to visual flight instruments (if present) and to control surface
actuators (elevator, aileron, rudder, throttle, trim tabs, etc.) to direct the craft.
As with every other aspect of electronics and mechanics, we have come a long way
with inertial navigation systems since 1958 - most significantly having replaced
the rotating mechanical gyroscope with optical versions. Accuracy, immunity to perturbances,
stability, ease of manufacturing, cost, and size have all been improved incredibly. Werner von Braun and his team of rocket scientists
are credited with developing the first useful inertial stabilization platforms for
ballistic missiles. The infamous and formidable
V2 rocket wreaked terror upon
the heads of Londoners during the latter days of World War II. It served to
keep the rocket in a fixed orientation during the boost phase of the flight, but
did not serve any active targeting function. Inertial navigation systems, on the
other hand, are used to provide both accurate positional and attitude information
for the pilot (if the platform has one) and to steer the platform (vehicle) to a
predetermined destination. Inertial navigation systems are therefore much more complex.
Early inertial navigation systems relied on physical spinning gyroscopes mounted
within a series of nearly frictionless gimbals to maintain a fixed reference position
in space. Contactless encoders about the rotation axes of the gimbals sent positional
information to a computer, which then performed necessary calculations and sent
formatted data to visual flight instruments (if present) and to control surface
actuators (elevator, aileron, rudder, throttle, trim tabs, etc.) to direct the craft.
As with every other aspect of electronics and mechanics, we have come a long way
with inertial navigation systems since 1958 - most significantly having replaced
the rotating mechanical gyroscope with optical versions. Accuracy, immunity to perturbances,
stability, ease of manufacturing, cost, and size have all been improved incredibly.
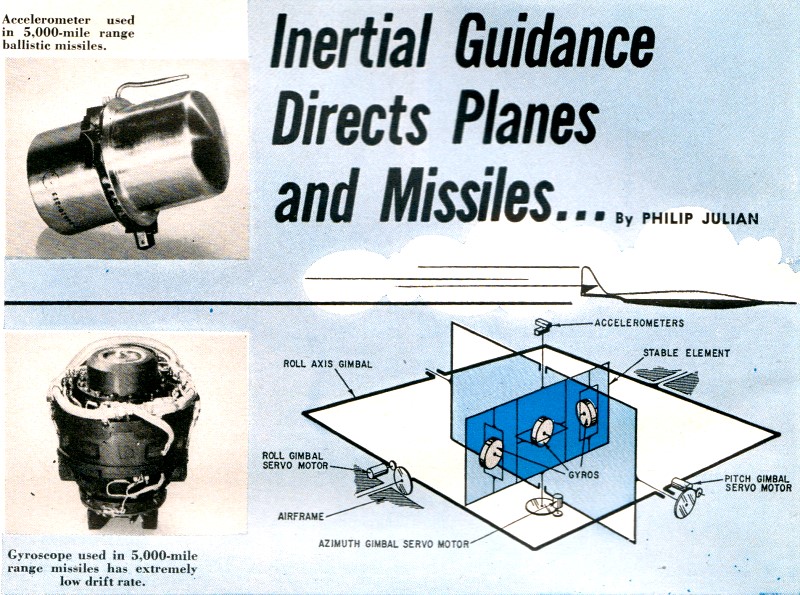
Inertial Guidance Directs Planes and Missiles
Fig. 2 - The stable platform consists of two or three gyroscopes,
plus two or three accelerometers mounted in a gimbal arrangement which allows gyros
to keep the accelerometers fixed in space, no matter how the vehicle moves. (Courtesy
of Aviation Week)
(top) Accelerometer used in 5,000·mile range ballistic missiles.
(bottom) Gyroscope used in 5,000-mile range missiles has extremely low drift
rate.
By Philip Julian
Electronic computers, gyroscopes and accelerometers, when properly combined,
form a sensitive guidance system that leads a guided vehicle to any spot on earth.
A new technique called "inertial guidance" enables man to match the ability of
birds to navigate unerringly over distances of thousands of miles without using
radio or radar. Furthermore, the inertial-guidance system can operate in weather
so bad that the birds are grounded.
Inertial guidance will direct our new intercontinental ballistic missiles (ICBM's)
to targets 5,000 miles away and will also direct our newest bombers, the supersonic
B-58 and hypersonic B-70, to their targets. It recently was used to guide the submarine
Nautilus on its polar mission.
An inertial-guidance system is completely self-contained in the missile or airplane.
It does not require ground-based radio or radar stations for assistance, nor does
it radiate any electromagnetic energy itself. Inertial systems do, however, make
extensive use of electronics.
There are a variety of possible inertial system configurations, depending upon
the intended mission. However, all operate on the same basic principle - measuring
accelerations of the missile or airplane throughout the guided portion of its flight.
From these measured accelerations an airborne computer system can calculate how
far the vehicle has traveled and in what direction.
The only data the inertial system computer needs is the position of the target
relative to the takeoff point. The computer then continuously calculates the vehicle's
position, compares it with the desired course-to-target, and generates signals which
automatically steer the vehicle onto the correct course .
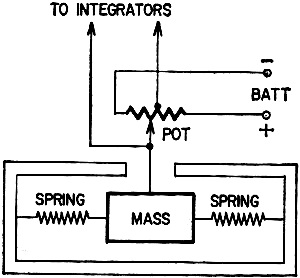
Fig. 1 - Cutaway view of a simple accelerometer. Any acceleration
of the vehicle in which the device is mounted causes the mass to be displaced from
the center, producing a signal which is proportional to the acceleration.
Because inertial systems are completely self-contained, do not themselves radiate
any electromagnetic energy and do not need ground-based radio-radar stations, they
offer several important military advantages:
Jam-proofness: There is no known way to jam or confuse an inertial
system. By contrast, guidance systems which use radio or radar can be jammed or
disrupted by enemy electronic countermeasures equipment.
Security: Unlike radio-radar guidance whose electromagnetic
radiation tips off enemy that the vehicle is coming, making it possible to launch
intercepting aircraft or missiles, inertial guidance gives no advance warning to
the enemy.
Mobility: Since inertially guided missiles require no large
ground-based guidance system installations, they can be launched from hidden sites
or quickly moved to other locations.
Certain limitations or disadvantages are, however, inherent in inertial systems.
For example, an inertial system is extremely costly because of the extreme precision
required to fabricate its components. Also, errors build up with time, so accuracy
is reduced on long missions. However, there are ingenious ways for getting around
this problem.
How does it work?
To understand how an inertial system operates, we must first examine the basic
fundamentals. These are quite simple. If you were told that an automobile had started
from rest and was accelerating uniformly at the rate of 10 feet per second every
second, you could calculate its distance at any given instant. The formula is:
Distance = 1/2 at2, where a is acceleration and t is time.
For example, after 1 second the car will have covered a total distance of 5 feet
(1/2 x 10 x 1). At end of 2 seconds the auto will have moved a total of 20 feet,
and after 3 seconds a total of 45 feet.
If the car were equipped with a device which could measure and indicate the acceleration,
and if we had a stop watch, scratch pad and pencil, we could always calculate how
far we had traveled.
Naturally, in a car equipped with an odometer-speedometer, there is no point
in going to such trouble to determine how far we have traveled. But in an airplane
or missile there is no such easy way of measuring distance covered and hence we
turn to inertial guidance. An inertial system continuously runs through the mathematical
calculation of the D = 1/2 at2 equation.
Measuring acceleration
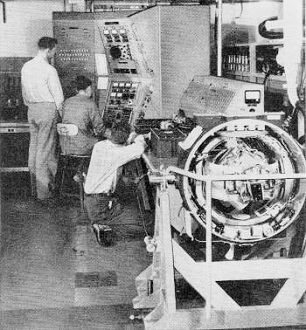
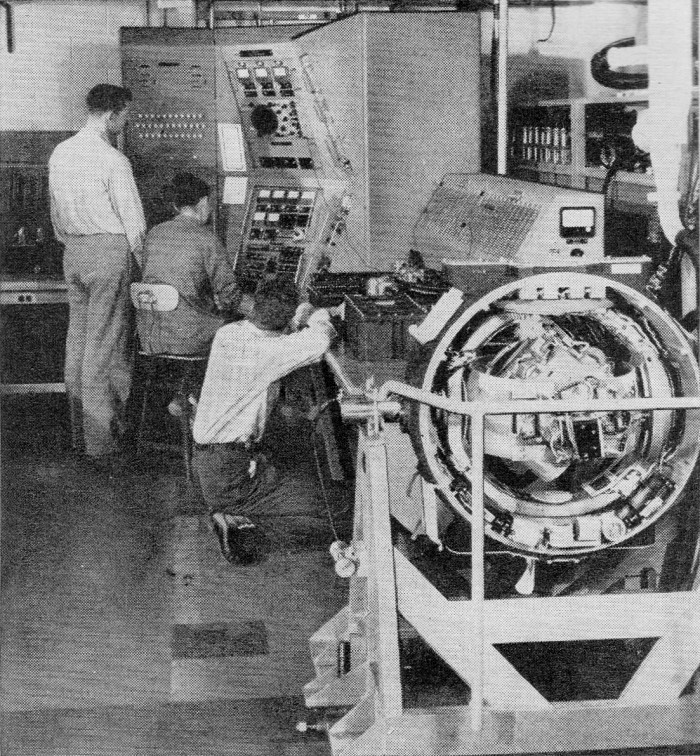
The stable platform on the right is undergoing a final series
of tests to check its accuracy.
To perform this computation, the inertial system must continuously measure vehicle
acceleration relative to the earth. To do this, the system employs devices known
as "accelerometers." One of them is installed in the aircraft or missile to measure
accelerations along its fore-aft axis. Another is installed so as to measure accelerations
at right angles to the fore-aft axis - corresponding to a line drawn through the
vehicle's wings (or where its wings would be if it had them). In certain applications,
primarily ballistic missiles, a third accelerometer is installed to sense accelerations
at right angles to the other two, essentially up-down accelerations relative to
the earth.
In principle, these accelerometers are very simple devices, but in practice they
become very complex to achieve the extremely high sensitivity and accuracy required.
The simplest type of accelerometer consists of a weight (mass) which is suspended
in an enclosure by two springs (see Fig. 1).
When the accelerometer is at rest (zero acceleration), the mass is centered relative
to its enclosure by the supporting springs. If the enclosure is suddenly moved along
its sensitive axis (line running through springs and weight), the weight will try
to "sit tight," until it is forced to come along with the enclosure by the forces
exerted by the springs. This follows Newton's laws of motion which say that a body
at rest tends to remain at rest unless acted upon by outside forces.
The amount that the weight is displaced from its center (zero-acceleration) position
inside its enclosure is in direct proportion to the magnitude of the acceleration
applied to the enclosure. If a small electrical pickoff (potentiometer, synchro,
etc.) is added to measure displacement of the weight from its center position, the
signal generated by the pickoff will be proportional to acceleration, and the complete
device will function as an accelerometer.
Because the accuracy of the inertial guidance system can be no better than the
accuracy of its accelerometers, more elaborate and more complex accelerometers than
the one described must be used. The problem is made more difficult because of the
wide range of accelerations the device must measure - from perhaps 100 G (100 times
the acceleration of gravity) to a few thousandths or millionths of a G.
Some inertial systems employ what are called "integrating accelerometers," which
sense acceleration and simultaneously perform the operation of "integration" so
that their output signal is directly proportional to the vehicle's velocity or distance
traveled. The integrating accelerometer is more complex than the elementary accelerometer,
but simplifies the calculations which must be performed by the system's computer.
In one respect, Nature appears to have conspired to make inertial guidance systems
impractical. This problem arises because the accelerometer which reacts to the vehicle
accelerations it seeks to measure also responds to the force of gravity which it
should ignore.
Thus an accelerometer intended to measure horizontal accelerations along the
fore-aft axis of an airplane or missile would correctly sense no acceleration when
the vehicle is at rest, so long as the accelerometer is truly horizontal. But if
the vehicle and accelerometer were slightly off level, the accelerometer weight
would be deflected from center by gravity, and the inertial guidance system would
"think" the vehicle had taken off when in fact it was still at rest.
If this were the extent of the problem, it could be easily solved by leveling
up the accelerometers before turning on the inertial system prior to takeoff. But
even if this were done, the missile or airplane obviously is not going to maintain
a perfectly level attitude once it has been launched.
The basic problem, then, is how to keep the accelerometers in position throughout
the mission to prevent them from sensing gravity and confusing it with acceleration
due to actual vehicle motion.
For a solution, inertial system designer - turn to the gyroscope, a device that
tries to hold its angular position always fixed in space. The simple spinning top,
or the toy gyro which children find so amusing, demonstrates this principle.
The stable platform
A basic gyro consists of a small flywheel spun at extremely high speeds, usually
by an electric motor. The shaft about which the flywheel rotates is called the "spin
axis," and it is this which the gyro seeks to hold fixed in space.
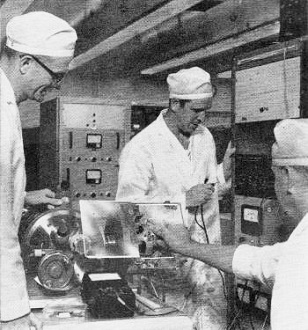
Inertial guidance gyros, accelerometers and other critical components
are assembled, inspected and tested in air-conditioned dust-free rooms to prevent
contamination and resultant inaccuracies.
If the gyro's spin axis is supported in a suitable frame, called a "gimbal,"
and this frame is in turn supported inside a larger gimbal, so that the outer frame
can be rotated freely about the inner spin-axis gimbal, we have a simple gyro. In
practice, many gyros have still a third gimbal which supports the other two.
When the gyro's flywheel has been brought up to speed, the outer gimbal (s) can
be rotated or moved to any position without disturbing the position of the spin
axis - just as if it were locked onto a distant star.
If such a gyro is installed in an airplane or missile, with its supporting gimbal
(s) attached to the vehicle's structure, the gyro will try to keep its spin axis
fixed in space regardless of changes in vehicle attitude during the flight.
If the spin axis is aligned with the true vertical before takeoff, the gyro will
seek to hold this same position throughout the mission. And if the accelerometers
are, in effect, mounted on the gyro spin axis (at right angles to it), they will
remain horizontal throughout the flight and cannot sense the unwanted gravity acceleration.
If another gyro is installed so that its spin axis is horizontal, instead of
vertical, and aligned with true north, this gyro will try to keep itself aligned
with north during the flight. This provides a heading reference by which the inertial
system can resolve vehicle movement into distance traveled in north-south and east-west
directions.
Inertial systems usually employ two or three gyros, depending upon the type of
gyro used. There are certain advantages and disadvantages to each type of configuration.
The combination of gyros, accelerometers, their supporting gimbals and related
mechanisms is called a "gyro-stabilized platform," or sometimes "stabilized platform,"
for short (see Fig. 2).
Gyro drift
If gyros kept their spin axes fixed in space indefinitely, the problem of designing
an inertial system would be easy, but once again Nature conspires to make the problem
difficult. In practice, a shift in the position of the spinning gyro flywheel on
its shaft of a few millionths of an inch can make the gyro wander ("drift") from
its original position. A speck of dirt or a metal chip too small to be seen by the
human eye, except through a microscope, in one of the gyro gimbal bearings can also
introduce serious errors in gyro performance.
Any such drift in the position of the gyro spin axis tilts the accelerometers
off horizontal, causing them to sense gravity acceleration, or shifts the heading
reference, making the system think the vehicle is moving in a different direction
than it actually is.
At the end of World War II, the gyros used in aircraft flight instruments (to
indicate airplane attitude and heading) had drift rates of about 15° per hour.
If inertial systems used such gyros, guidance accuracy would be completely unacceptable.
Today, industry builds gyros which have drift rates of only .01° per hour.
Such a gyro has less drift after 2 months of operation than the post-war flight
gyros experienced in a single hour. Gyros with still lower drift rates are under
development.
To build such extremely accurate gyros, manufacturers must assemble them in ultra-clean
air-conditioned rooms where the air is continuously filtered to keep out microscopic-size
particles of dust. Employees must wear lint-free nylon hats and coveralls, and coats
and tools are cleaned at least once a day. No one can enter without passing through
airlocks equipped with high-power blowers which dust him off thoroughly.
Individual parts that go into the gyro are inspected under microscopes for possible
burrs which might work loose and find their way into bearings. Deburring is done
under a microscope, using precision dental tools.
The thinking heart
The heart of any inertial system is the computer which integrates acceleration
signals to determine distance traveled, resolves this into distance covered in north-south
and east-west directions, then compares this with the path the vehicle must fly
to hit its target, and finally it calculates what signals must be sent to vehicle's
controls to maneuver it onto the desired course.
These computations must be performed from takeoff throughout the guided portion
of the mission. For a ballistic missile, where guidance lasts only several minutes
(from there on the missile behaves like an unguided projectile), the computer must
work at lightning speed and with extreme accuracy. Unless errors in missile path
are quickly corrected, the missile may go out of control or miss the intended target
by a wide margin.
Most of the new inertial systems under development use tiny digital computers.
These are first cousins to the familiar giant computing brains, but have been so
miniaturized that they occupy no more than a couple of cubic feet in volume. Some
of the newer airborne digital computers for inertial system use occupy less than
1 cubic foot.
To reduce computer size, designers have gone to all-transistor models. One such
computer, being developed for intercontinental ballistic missiles, uses approximately
1,200 transistors and 10,000 diodes. Choice of targets is made by plugging appropriate
subassemblies into the computer.
Schuler-tuned systems
Although industry's designers have made remarkable progress in the past 10 years
in improving the performance of gyros and accelerometers, an extremely stiff price
must be paid in terms of manufacturing and inspection cost to hold down errors in
inertial systems intended for use on long missions.
For example, an inertial navigation-bombing system for use in a 1,000-mph bomber,
like the B-58, must maintain good accuracy for 5 hours to reach a target 5,000 miles
away. This is more than 60 times the period that an inertial system must provide
guidance for an ICBM. This means that gyro drift errors accumulate for 60 times
as long and hence can be something like 60 times greater.
Fortunately, Nature lends a helping hand here in the form of a principle first
suggested in 1923 by Dr. Maxmillian Schuler, a German professor of applied mechanics.
Applying this principle of the "84-minute pendulum," to provide what often is called
a "Schuler-tuned" inertial system, greatly reduces error buildup on long missions
by effectively washing out gyro drift and some, but not all, of the accumulated
errors approximately every 84 minutes.
Hybrid systems
Even with Schuler tuning, it is not easy to get the high-precision accuracies
required for long military missions. Another approach which eases the accuracies
required of gyros and accelerometers is to combine the inertial system with some
other navigation technique to form a hybrid system.
One such hybrid system uses a small airborne Doppler radar which measures the
vehicle's ground speed accurately. The Doppler radar is used to correct for errors
in acceleration measurement while the vehicle is over friendly territory where its
electromagnetic radiation does not give it away. Once the vehicle approaches enemy
territory, Doppler radar can be turned off and the system operated as a pure inertial
system.
Another possible hybrid system configuration combines inertial and celestial
navigation techniques. Electro-optical devices are available which automatically
track a star, determining its azimuth (direction) and elevation position. Two such
devices, together with a vertical reference such as a stabilized platform provides,
furnish enough information for a computer to calculate the vehicle's position.
Such periodic star fixes can be used to correct any accumulation of errors in
the inertial system when suitable stars are available for sighting. When clouds
prevent obtaining a star sight, the system reverts to its pure inertial mode of
operation.
Size, weight and cost of an inertial guidance system depend upon its intended
use, including such factors as mission duration and required accuracy. Although
exact figures are not available because of military security considerations, an
inertial guidance system for ballistic missiles is believed to weigh between 400
and 500 pounds, including the computer. A single system probably costs in the neighborhood
of $250,000.
With developments now under way, weight of such an inertial system ought to come
down to perhaps 200 pounds and its price down to perhaps $150,000. For short-range
uses, such as in helicopters for navigation where mission times are measured in
minutes and extreme accuracy is not required, it is possible to build an inertial
guidance system today which weighs less than 100 pounds.
Despite its weight and price, which are high compared to other navigation guidance
techniques, the many attractive military advantages of inertial guidance suggest
it will find increasing use in new military missiles and aircraft.
Posted December 14, 2021
(updated from original post on 8/14/2014)
|