|
|||||||||||||
 |
|||||||||||||
How Radio-Control Systems Work
|
|||||||||||||
Radio control (R/C) systems operating in the 2.4 GHz ISM band, using one of or a combination of frequency hopping and direct sequence spread spectrum scheme, have been in widespread use since the early 2000s. As with any new technology, there was a lot of reluctance to adoption of the systems based on a few reports (valid or not) of performance issues - primarily lack of control range where communications between the transmitter (Tx) and receiver (Rx) with a pilot and aircraft was lost and a crash ensued. Tx power was already at the FCC-mandated maximum, so manufacturers quickly improved receivers by adding diversity with a second Rx antenna. The receiver microprocessor continuously monitors signal integrity from both antennas and uses the best one. It is the same scheme that was already being used by WiFi routers also operating at 2.4 GHz. By 2010 or so no R/C system companies were making 72 MHz (airborne) or 75 MHz (ground) AM and FM systems. Technology for those former AM and FM systems had improved significantly between the time this article appeared and when the 2.4 GHz systems finally dominated. The physical size and weight of receivers has been reduced to 1/2 or 1/4 of 1990s era versions, but not just because of the frequency and modulation scheme change; it was due to an electronics industry-wide advance in component size decrease and performance increase. Reliability improved as well for all kinds of circuitry and components. IMHO, the greatest benefit of the 2.4 MHz spread spectrum R/C systems was the ability of many aircraft to operate simultaneously without worrying about being "stepped on" by someone on a directly adjacent channel frequency (with an out-of-spec transmitter oscillator) or even by some idiot in the pit area turning on his transmitter on your frequency to adjust his airplane while yours is in the air (often causing a crash from interference). The 72 MHz systems are assigned 50 unique frequencies at a 200 kHz spacing. Spektrum R/C, one of the earliest 2.4 GHz R/C system pioneers, did a demonstration sometime around 2006 with 100 airplanes in the air at the same time to prove interference immunity. Entire books can be (and have been) written on the evolution of R/C systems. See also "How to Get Started in Radio Control Modeling" in the February 1974 Popular Electronics issue. How Radio-Control Systems Work - Types of Remote R/C Systems Used to Operate Model Planes, Cars, and Boats
A growing number of hobbyists has been attracted to radio-control modeling due to new solid-state designs and exam-free CB licensing. The electronic gear in today's modeling provides wide response flexibility and high reliability in extremely compact, lightweight packages. (See also "Radio Control For Hobbyists," February 1974. ) There are two commonly used basic schemes in R/C equipment. The simplest is a refined version of single-channel, pulse-proportional control. The other, a digital system, is a sophisticated feedback proportional control that utilizes pulse-position modulation.
Fig. 1A - Block diagram of contemporary five-channel digital-proportional transmit and receive system is complete as shown except for servos.
Fig. 1A - The decoder system uses typical IC's. Pulse-Proportional Systems The only tone-modulated, pulse-proportional system we know of on the market today is made by Ace R/C. Its major advantages are minimal weight and low cost. It is used primarily in situations where multi-channel flexibility is not required. In the Ace R/C system, a 600-Hz tone is pulsed on and off at the transmitter to drive an actuator in the receiver. The receiver demodulates the received pulsed tone and produces a square-wave output that reproduces the pulses originally sent to the transmitter's tone modulator. The switching outputs of the receiver connect one end of the actuator or the other (depending on the command initiated at the transmitter) to the positive voltage supply. This type of system is limited to one proportional function. The repetition rate is from 6 to 8 pulses per second. The model under control does not respond to individual pulses. Instead, it follows the average position. Digital-Proportional Systems Digital systems all use the same pulse-position modulation scheme, with the r-f envelope amplitude-modulated by a series of pulses at a specific interval (frame length) of from 10 to 15 milliseconds. Each pulse is separated from the others by a nominal 1.5 milliseconds. This separation is independently and continuously variable by ±0.5 millisecond (maximum) for control. The decoded output to a digital feed back servo is a pulse that duplicates the original control input to an accuracy of 99.75 percent. The block diagram of a typical digital-proportional transmit/receive system is shown in Fig. 1. The wavetrain illustrated is for a five-channel system. The objective of digital encoding and decoding is to obtain a specific width-control pulse for each servo in the system. The length of the pulse must be variable over the desired control range. Timing and synchronization of the scheme is shown in Fig. 2. The times indicated are approximate and are representative of those used in current systems. A typical encode/decode process takes place as follows. The clock oscillator in Fig. 1A establishes the repetition rate of the system, which is usually 10 to 16 milliseconds or 60 to 100 Hz. The trailing edge of the frame pulse triggers the first stage. Upon being triggered, the first stage changes state for a period of time determined by the control potentiometer. The output of each stage is gated by a diode to an RC differentiator, and a small spike at the input to the squaring block occurs at the trailing edge of the stage's output pulse. This spike is also coupled to the next stage for triggering. Stage two stays on for its commanded period (t2 in Fig. 2). Stages three through five follow in like manner. Then 3 to 8 milliseconds are permitted to elapse to allow the decoder to reset. The clock, having completed its 15-millisecond period, changes state to restart the cycle.
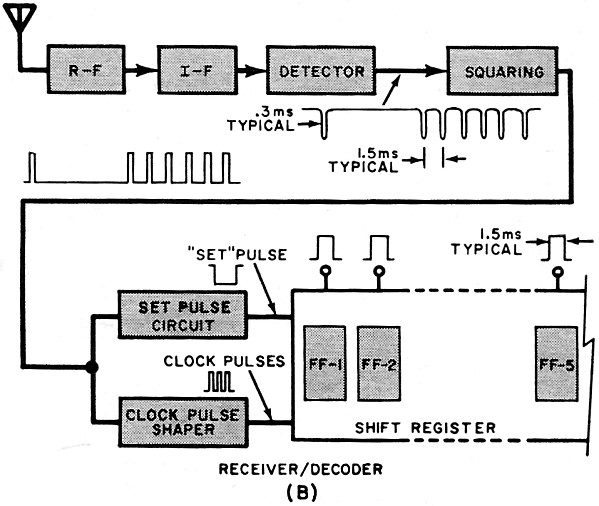
Fig. 2 - Waveforms show timing and synchronization of digital signals. Those at (A) are for one frame of encoder; (B) is for decoder; and (C) shows control variations. The gated output spikes appear at the input to the squaring amplifier in the first frame of pulses. The squaring stage converts each spike to a well-defined pulse with a 0.3-millisecond nominal width for control of the modulator. The position of each pulse relative to the preceding pulse is the transmitted information - hence, pulse-position modulation. The rise and fall times of the pulsed r-f envelope must be carefully controlled to obtain an acceptable sideband spectrum. The receiver attempts to reproduce the encoded envelope with the best possible fidelity for presentation to the decoder. Digital-Decoder The decoder, shown in block diagram form in Fig. 1B and schematically in Fig 3, is typical of modern IC decoders. The output of the receiver is a train of two (for one channel) to nine (for eight channels) pulses per frame. The inverters switch between a 4.8-volt high level to almost zero for the low level. Transistor Q1 serves primarily as an inverter for the incoming signal, although it also provides a slight amount of amplification. The pulse train that comes off the collector of Q1 proceeds to two stages. The stage consisting of inverters 4 and 5 generates the "set" pulse, while the one made up of inverters 2 and 3 shapes the pulse train to form the clock or "shift" pulses. The shift-pulse shaper accepts the pulse train, squares it, and slightly stretches it by feedback through C3. The low output from inverter 2 is shifted high by inverter 6 to provide the proper output. The shaped clock pulses are then passed to an eight-bit shift register. Upon receipt of the sync pulse, the diode and C4 act as a "sample-and-hold" circuit or pulse stretcher. Discharging through inverter 4, C4 places the inverter in a high state. At this point, the pulse is stretched across the entire pulse train. The output from inverter 5 is square and low during the period when the pulse train is present. The shift register is set by having the output of the inverter high at the instant the first clock pulse is received. The set is immediately driven low until after the last pulse is received. Flip-flop FF1 in the register is inhibited from shifting to high at its Q output until the next frame of information is received. (see Fig. 1B) . The two control functions are entered at the set (S) input of FF1 and at the clock inputs. When there is no information present during the sync (set) pause period, the FF1 through FF8 Q outputs are low. As soon as the first clock pulse is received, FF1's Q output goes high. Unless it "sees" a high input at SA and SB, which it does at the instant the first clock pulse is received, FF1 (at its Q output) cannot shift. It remains high until the second clock pulse is received, at which time it goes low.
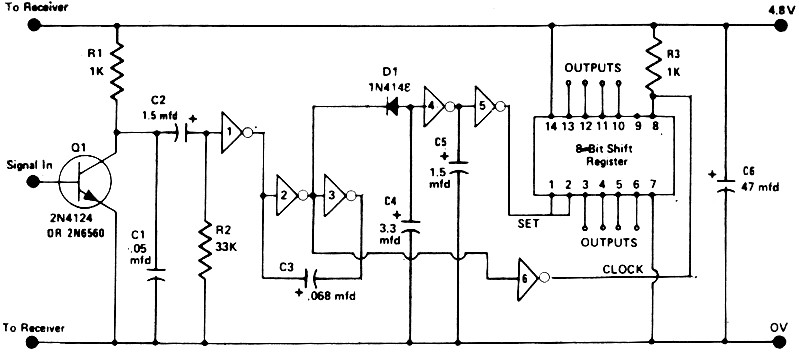
Fig. 3 - Schematic diagram of the decoder shows how the 8-bit shift register in IC is used to simplify the circuit. Transistor Q1 is inverter and amplifier for input.
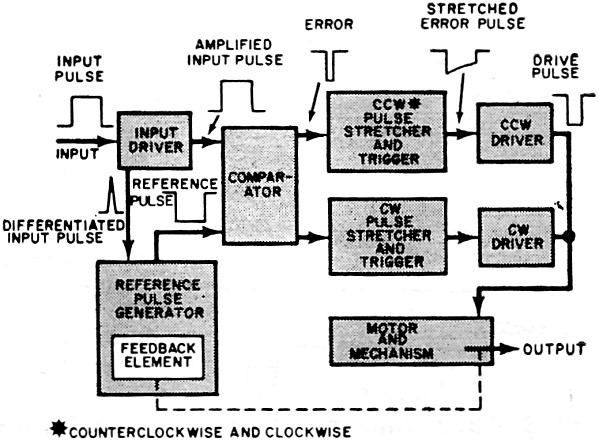
Fig. 4 - Most of the functions in digital servo are included in a single IC device.
Fig. 5 - Diode-resistor comparator determines relative width of pulses in digital servo. If the S input of FF1 were to remain high at all times, FF1 would simply shift high alternately at its Q and not-Q outputs every time a clock pulse is received. Now, FF1 cannot shift again as long as the output of inverter 5 is low. This is why the pause between frames is caned the sync or "set" pause. Bear in mind that the Q output of FF2 cannot shift high until the S input is high. It sees a high level only when the Q output of FF1 is high. As soon as FF1's Q output is driven high, FF2 is set to shift high at its Q output when the second pulse, which sets the Q output of FF1 to low, is received. The Q output of FF2 remains high until the third pulse is received to drive it low and the Q output of FF3 high, and so on down the line through FF5. As soon as C.5 and C6 have discharged after t-he last pulse, the output of inverter 5 returns to high, setting FF1 for the next frame. The Servo Figure 4 is a block diagram of a digital feedback servo. Almost all servo amplifiers now consist of a specially designed IC that contains all the control functions shown in the diagram. The only external components needed are used for dead-band, travel, and feedback sensitivity trimming. The servo functions as follows. First, a reference pulse is generated, its width determined by the feedback element as positioned by the servo output arm. The incoming signal may be wider or narrower than the reference pulse. The comparator, usually a diode-resistor network, determines the relative width of the pulses (see Fig. 5). The pulse stretcher and trigger convert the error pulse, measured in microseconds, to a longer pulse suitable for turning on the servo driver. The driver then applies B+ power to the servo motor, providing full power at any position. As the motor and servo arm are driven, the feedback element is repositioning to yield a pulse that is exactly equal in width to the input pulse. The repositioning can take several frames to occur because full servo travel requires 0.5 to 1.0 second, depending on such factors as gearing and battery voltage. Summing Up Radio control for modeling has come a long way since the 1950's. With today's equipment, containing the sophisticated electronics described here, the modeler has at his command a control system that responds in a manner very similar to the systems used in full-size aircraft, racing and standard cars, and boats.
Posted April 14, 2020 |
|||||||||||||
 |
|||||||||||||
|
|||||||||||||

 By Fred Marks
By Fred Marks 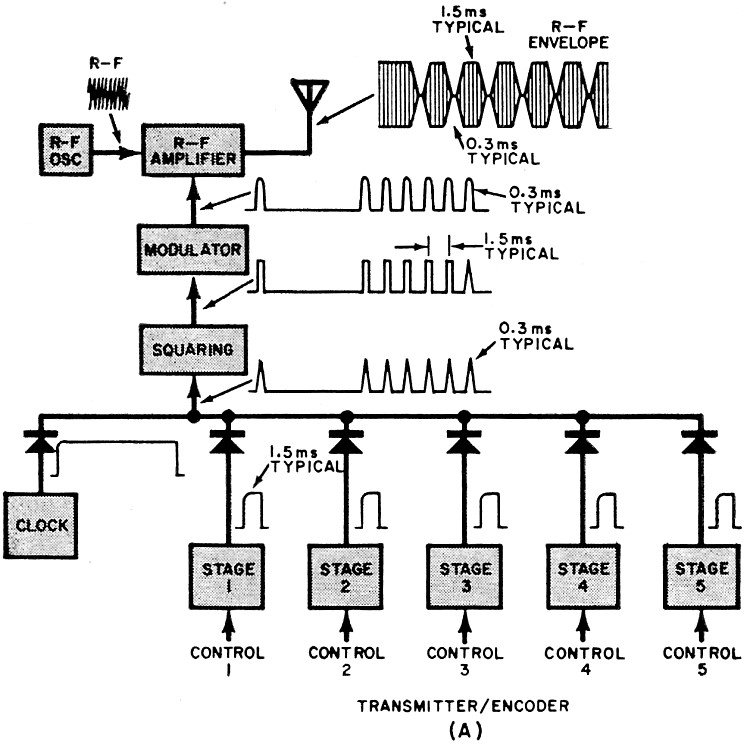



|
||||||||||||||||||||||||||||||||||||





























