|
|
|||||||||
| Software: RF Cascade Workbook | RF Symbols for Office | RF Symbols & Stencils for Visio | Espresso Workbook | ||||||||||
|
|||||||||||||||||||||||||||||||
  |
   |
||||||||||||||||||||||||||||||
|
Please Support RF Cafe by purchasing my ridiculously low-priced products, all of which I created. RF & Electronics Symbols for Visio RF & Electronics Symbols for Office RF & Electronics Stencils for Visio T-Shirts, Mugs, Cups, Ball Caps, Mouse Pads These Are Available for Free |
|||||||||||||||||||||||||||||||
























Electronic Navigation in Flight
August 1962
Radio-Electronics

|
August 1962 Radio-Electronics  [Table of Contents] [Table of Contents]
Wax nostalgic about and learn from the history of early electronics. See articles from Radio-Electronics, published 1930-1988. All copyrights hereby acknowledged. |
The AN/MPN-13|14 mobile radar system I worked on while enlisted in the U.S. Air Force was designed and fielded around the time this "Electronic Navigation in Flight" article appeared in a 1962 issue of Radio-Electronics magazine. It had been upgraded a few times by 1979 when I was in Air Traffic Control Radar Repairman technical school at Keesler AFB, Mississippi; however, the original system did not featured a Doppler capability. The fully RF analog system could not provide air traffic controllers with speed data, but it did use physical mercury delay lines to provide a stationary target (ground, and to some degree, rain, clutter) cancellation by inverting and summing a real-time radar return signal with a copy of the previous return. One of the upgrades to our system was a digital Identification Friend or Foe (IFF) secondary radar - the TPN-42 - which used the airborne transponders to display squawk codes and altitude information. It did not have enough computing power to display ground speed and/or airspeed.
Electronic Navigation in Flight
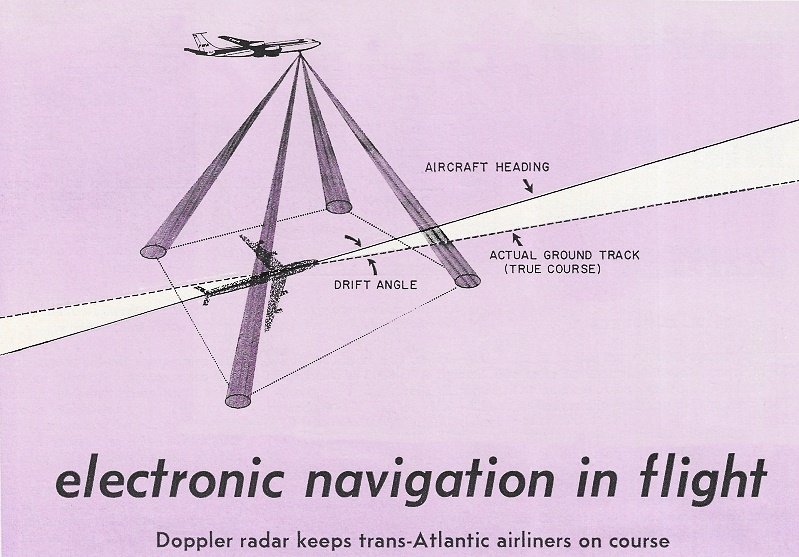
Doppler radar keeps trans-Atlantic airliners on course.
By Victor A. Damora
Airborne electronic navigation systems that determine continuously the speed and position of an aircraft, automatically and without the aid of information from ground stations, make it possible for today's long-range high-speed aircraft to fly anywhere over the surface of the earth any time and under any conditions.
In one type of guidance system, Doppler navigation radar reads drift angle and ground speed. The results are fed to a velocity triangle computer to obtain the aircraft track - the actual path of the aircraft over the surface of the earth.
A representative type of Doppler navigation radar is discussed in this article. First, however, let's review a few factors that were once the exclusive problem of the navigator, and must now be familiar to the aircraft electronic technician.
We all know of the steering corrections that must be made when rowing a boat across a moving stream. The boat must be headed upstream in relation to the intended course to reach a desired destination. The faster the stream and the slower the boat, the greater the correction required. Aircraft navigation problems with respect to wind are much the same.

Fig. 1 - Vector triangle for aircraft in flight. Wind speed and direction are represented by vector 1. Aircraft air-speed, vector 2, drawn from end of wind-speed vector, is equal to 1 hour of flight. It becomes aircraft true heading . Vector 3 is resultant of vectors 1 and 2. It is equal to aircraft ground speed which, in this case, is greater than the airspeed of the aircraft. This is because the wind helps the aircraft along its intended course.
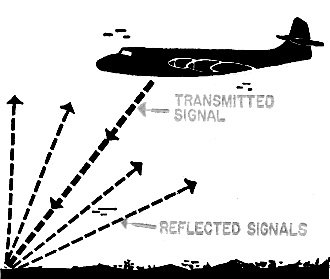
Fig. 2 - Radar signal is transmitted ahead of plane. Part of signal is reflected to plane. Its frequency will be changed because of Doppler effect.

Fig. 3 - On-course flight shows four beams of typical navigation radar.

Beams misaligned from true course. Beams Band C almost equal; beams A and D almost at maximum difference frequency. Difference is read to show plane is drifting sideways.
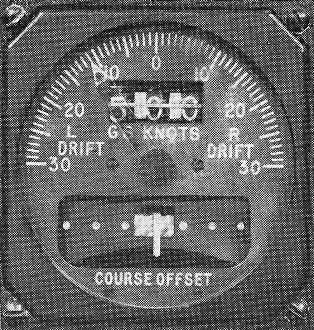
Doppler indicator gives two readings-ground speed in knots and drift angle in degrees.

Overhead panel gives pilot selected course readings, deviation left or right, and miles to go to a pre-selected point.
Fig. 1 shows a triangle of velocities that governs the true course of the air-craft through the air and over the ground. There are six factors to consider:
1. Wind direction.
2. Wind velocity.
3. True course or desired track of the aircraft.
4. Ground speed.
5. True heading.
6. True airspeed.
The ground speed of the aircraft, as shown in Fig. 1, is the resultant of the true airspeed and the wind speed. The track is the angle between the aircraft's actual course over the surface of the earth and a reference direction such as true North. The true heading of the aircraft is the angle between the longitudinal axis of the aircraft and the reference direction. The drift angle is the angle between the aircraft true heading and the track. If certain combinations of these factors are known, it is possible to determine the remaining ones.
Doppler Radar System
The outputs from a Doppler radar navigation system indicate the drift angle and ground speed. Therefore, only the true heading and true airspeed are required to solve the triangle of velocities. The true heading may be obtained from conventional cockpit instrumentation or from a simple inertial heading reference (directional gyro). True air-speed may also be obtained from conventional cockpit instruments such as the airspeed indicator (corrected for temperature and pressure).

Fig. 4 - Block diagram of typical navigation system.
Doppler radar operation is, of course, based upon the Doppler effect. This effect causes an apparent change in frequency when a transmitter moves either toward or away from the receiver or when the receiver moves either toward or away from the transmitter. If a transmitter and receiver are moving toward one another, the effect is an increase in frequency. Conversely, if the transmitter and receiver are moving away from one another, the effect is a decrease in frequency.
If a single pencil beam of microwave energy is transmitted forward from the aircraft, as shown in Fig. 2, some of the energy will be reflected back to the aircraft, but at a higher frequency. The frequency change is determined by comparing the received frequency to the transmitted frequency. The change is proportional to the speed of the aircraft. This simple system is all we need to obtain ground speed. However, to learn the aircraft drift angle, more than one beam is required. In most Doppler navigation systems in use today an antenna array having three or four beams, is employed.
Fig. 3 shows the four beams of a practical Janus type Doppler navigation radar. (Janus was a two-faced Roman god that could look in both front and rear directions.) The forward beam (A) and the diagonally opposite rear beam (D) are paired. The other forward beam (B) is similarly paired with the diagonally opposite rear beam (C). The two pairs of beams time-share the radar transmitter and receiver. Time is shared by switching the antenna feed electronically or mechanically.
Some of the microwave energy transmitted to the ground from a pair of beams is reflected to the radar receiver through the same beam pair. Since the aircraft is moving, the energy received in the forward beam (A, Fig. 3) will be higher in frequency than the transmitted energy and the energy received from the diagonally opposite rear beam (D, Fig. 3) will be lower. This is caused by the Doppler shift. The reflected signals received from a pair of beams are mixed to produce a difference frequency. The process is repeated, using the other pair of beams, and the two difference frequencies are compared.
The difference frequency of the two beam pairs are alike only when the beams are aligned symmetrically along the aircraft track. Aircraft heading derived from cockpit instruments and the error signals developed from any detected difference between the beam pair differences is used to compute aircraft drift angles. In some systems the error signals are fed to a synchro system to keep the steerable antenna aligned with the aircraft track. The angular difference between the antenna alignment and the longitudinal axis of the aircraft is the drift angle.
The difference signal produced from a single pair of beams is also used to control a frequency generator whose signal is proportional to the ground speed. Fig. 4 is a simplified block diagram of one type Doppler navigation radar. The equipment used by TWA, the first American airline to experiment with the system, is made by Bendix. General Precision Labs also makes a system, and there may be others.
The Doppler navigation radar, compass system, controls and cockpit displays form a simple reliable airborne navigation system which is completely independent of ground aids. Such systems are used in many of today's commercial jet aircraft. They are tied in with the autopilot, making it possible to fly long distances under autopilot control without the aid of ground navigational devices, yet arrive right at the desired destination.

Copyright: 1996 - 2026 |
About RF Cafe RF Cafe began life in 1996 as "RF Tools" in an AOL screen name web space totaling 2 MB. Its primary purpose was to provide me with ready access to commonly needed formulas and reference material while performing my work as an RF system and circuit design engineer. The World Wide Web (Internet) was largely an unknown entity at the time and bandwidth was a scarce commodity. Dial-up modems blazed along at 14.4 kbps while tying up your telephone line, and a lady's voice announced "You've Got Mail" when a new message arrived... |
Copyright 1996 - 2026 All trademarks, copyrights, patents, and other rights of ownership to images
and text used on the RF Cafe website are hereby acknowledge My Hobby Website: My Daughter's Website: |
